1.1 SOLUTION STRUCTURE
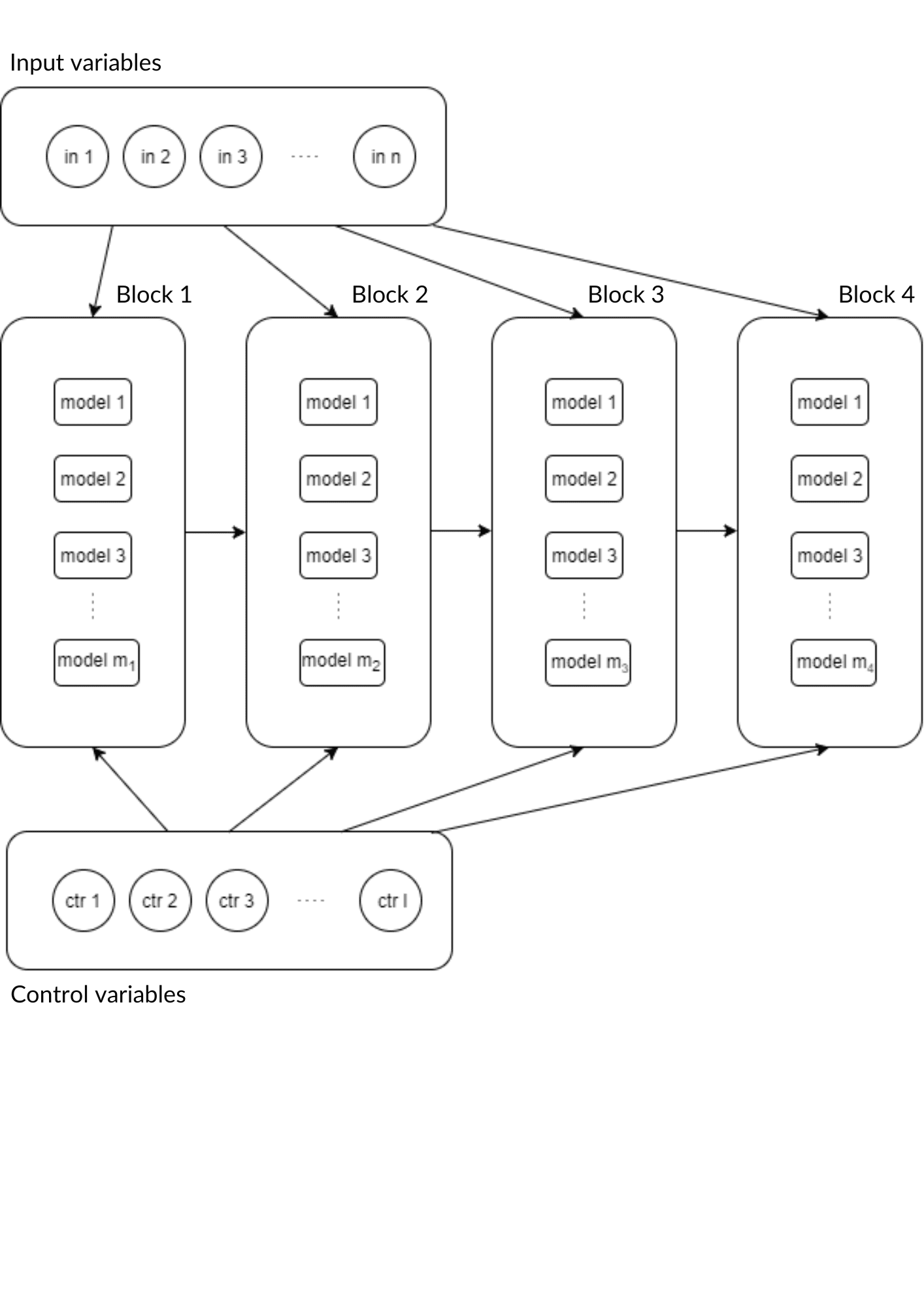
The implemented approach is to model each output variable separately using all the information available in a given block (i.e., the values of control variables, input variables from previous blocks and the current block).
Validation of the models created in this way was performed based on the part of the data that was not used in any way in their learning process. Thanks to this approach, it was possible to determine with high probability the degree of generalization of the model and, consequently, its predictive ability.
In the next step, the blocks modeled in this way were combined into the structure shown in the diagram below. This approach allows the prediction of all the values of the output variables for which the models were created using only the necessary values of the input and control variables.
This model could then be used in tandem with the optimization module to find the optimal control of the reforming process according to the penalty function presented in the next section.
The final step is to implement the system alongside the running process. In this case, the optimization algorithm will continuously read the values of the input data and, based on this, return the optimal process control in real time.




 +48 12 394 11 2
+48 12 394 11 2
 biuro@reliasol.ai
biuro@reliasol.ai



 Reliability Solutions B.V.
Reliability Solutions B.V.


